Welcome to my publication portfolio! Here you’ll find a collection of my research in Robotics, Automation, and Mechanical Engineering. Each publication highlights my contributions to advancing technology, from developing non-vision-based object detection methods to innovative approaches in automated systems. Explore the papers to see how my academic work drives cutting-edge solutions in these fields.
Semi-autonomous Teleimpedance Based on Visual Detection of Object Geometry and Material and its Relation to Environment
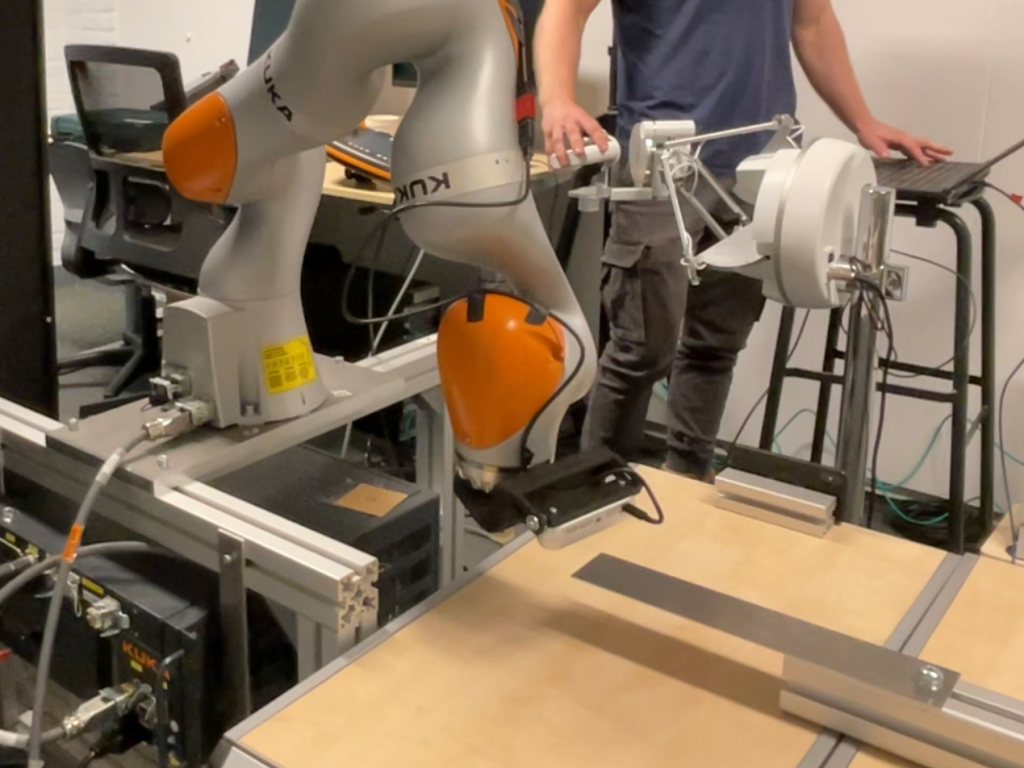
We developed a semi-autonomous teleimpedance control system that combines human operation with robotic autonomy. The robot adjusts its stiffness based on real-time visual detection of object geometry and material, improving interaction safety and precision. This method was successfully validated through tasks like bolt engagement and surface polishing, demonstrating its potential for enhancing robot-environment interaction.
Force-Based Object Dimension Estimation in Practical Bin Picking Scenarios
We developed a force-based method for estimating object dimensions in practical bin-picking scenarios, eliminating the need for cameras. This approach uses force and torque data to predict object dimensions, enhancing the precision of camera-less bin-picking systems. Tested with real-world objects, the method achieved accurate predictions within a margin of 8-18%, offering a cost-effective solution for industrial applications.
